Conception en CATIA : TRACE DE CAME - Conception Mécanique - CAO

TRACE DE CAME
Document préparé avec Catia V5R14 Sp3
1- Présentation du problème
Projet de mise en forme de coupole d'avion de chasse.
L'analyse fonctionnelle du mécanisme a conduit à retenir une solution combinant une translation d'un chariot qui va amener le rouleau au contact du plexiglas, puis ensuite un système de levier permet au rouleau de bien plaquer la feuille de plexiglas sur le gabarit.
On a donc un mécanisme avec 2 phases de mouvement.
De plus le mécanisme devant être rustique, la rotation du levier par rapport au chariot sera commandée par un système mécanisme simple, ce sera une came.
Le premier but de ce TD est de définir un schéma du mécanisme sous forme de squelette paramétré et fonctionnel, c'est-à-dire qu'il est possible de le faire fonctionner avec des outils de cinématique comme Motion par exemple et d'en dégager ou vérifier les lois cinématiques.
Nous ne disposons pas de Motion intégré à Catia, donc nous utiliserons les outils natifs Catia au niveau de la cinématique, DMU Kinematics, ou même le manipulateur disponible dans l'atelier Assembly Design.
Ensuite il va falloir définir le profil de la came afin de respecter les mouvements.
Nous allons faire une sorte de rétro conception en imposant le mouvement du levier par contraintes relativement au gabarit, ce qui va permettre de définir le profil de la came, ensuite nous contraindrons le mouvement du levier par rapport à la came en ayant supprimé les contraintes relativement au gabarit.
Nous allons concevoir le mécanisme Montage de formage.CATProduct, contenant les pièces Bati.CATPart, Chariot.CATPart, Levier.CATPart.
Vérifiez le réglage des options définis sur la Figure 1

Figure 1
2- Le schéma
Dans Catia, faites un nouveau Product et enregistrez-le sous le nom Montage de formage.CATProduct.

Figure 2
Insérez la pièce Bati.CATPart
Insérez la pièce Chariot.CATPart, en répondant Non au message défini sur la Figure 3.

Figure 3
Insérez la pièce Levier.CATPart

Figure 4
Dans chaque pièce, créez un corps de pièce qui aura pour nom Schema, c'est dans ces corps de pièce que l'on va modéliser les lignes et plans définissant le schéma du mécanisme. Il est possible de créer ce corps de pièce dans la première pièce, puis de faire un copier/coller vers les autres pièces.
Ouvrez la pièce Bati dans une nouvelle fenêtre, et choisissez le corps de pièce Schema comme objet de travail, objet souligné dans l'arbre du modèle.
Figure 5
On pourrait créer un plan confondu avec le plan YZ, mais ce n'est pas nécessaire.
Créez une droite de longueur 200 mm sur l'axe Y, et un point de coordonnées 0,0,70
Créez aussi une esquisse conforme à la Figure 6, cette esquisse sera constituée d'un segment de droite et d'un arc de cercle limité par le segment de droite et par l'axe Z.

Figure 6
Fermez la fenêtre d'édition du Bati en enregistrant et revenez dans l'ensemble.
Editez la pièce Chariot dans une nouvelle fenêtre, et choisissez le corps de pièce Schema comme objet de travail.
Définissez un plan confondu avec le plan YZ, une esquisse conforme à la Figure 7 inutile au niveau fonctionnement, elle ne sert qu'à imager une liaison glissière, créez aussi une ligne de longueur 20 suivant -X et passant par le point 0,85,0.


Figure 7
Fermez la fenêtre d'édition du Chariot en enregistrant et revenez dans l'ensemble.

Figure 8
Editez la pièce Levier dans une nouvelle fenêtre, et choisissez le corps de pièce Schema comme objet de travail.
Définissez un plan confondu avec le plan YZ, une ligne de 50 mm suivant Y, une ligne de 20 mm suivant X, cette ligne passe par le point 0,50,0.

Figure 9
Fermez la fenêtre d'édition du Levier en enregistrant et revenez dans l'ensemble.
Définissez une contrainte de fixité sur le Bati.

Figure 10
Les différentes pièces sont un peu mélangées puisqu'elles ont la même origine pour leurs repères de définition, séparez-les en utilisant la boussole, afin de clarifier la visualisation.

Figure 11
Enregistrez votre modèle.
Le Chariot est en liaison glissière avec le Bati, placez les 2 contraintes d'assemblage correspondantes et faites translater le Chariot légèrement en utilisant le manipulateur Sous contraintes.


Figure 12
Cachez les repères de chaque pièce, afin d'améliorer la lisibilité su mécanisme.
Le Levier est en liaison pivot avec le Chariot, placez les 2 contraintes d'assemblage correspondantes, le plan YZ du Levier sera coïncident avec le plan YZ du Chariot et les 2 lignes de longueur 20 parallèles à l'axe X seront confondues.
Il reste à mettre en coïncidence l'extrémité libre du Levier avec l'arc de cercle simulant le gabarit.
Il n'est pas possible de le faire en ces termes, on va donc mettre une contrainte de distance entre le centre de l'arc de cercle et l'extrémité libre du Levier, cette distance sera égale au rayon du cercle bien entendu, mais par l'intermédiaire d'une relation.

Figure 13
Cachez les repères des esquisses, les plans des schémas et faites bouger votre mécanisme en utilisant le manipulateur sous contraintes.
On remarque que l'extrémité du Levier reste sur l'arc de cercle ou son prolongement, mais ne passe pas sur la partie horizontale de l'esquisse du Bati.
Ceci pourra se concrétiser par l'intermédiaire du module DMU Kinematics.
3- Cinématique
Maintenant nous allons utiliser le module DMU Kinematics afin de pouvoir balayer toute l'esquisse du Bati.
Passez dans cet atelier.
La mise en place des contraintes d'assemblage a été faite avec soin, il va être possible de convertir directement ces contraintes d'assemblage en liaisons cinématiques.
Lancez la commande de Conversion de contraintes d'assemblage, créez un nouveau mécanisme, Mécanisme.1

Figure 14
Passez en revue toutes les contraintes d'assemblage et créez les liaisons cinématiques correspondantes, créez la pièce fixe, qui sera le Bati puisqu'on lui a mis une contrainte de fixité.
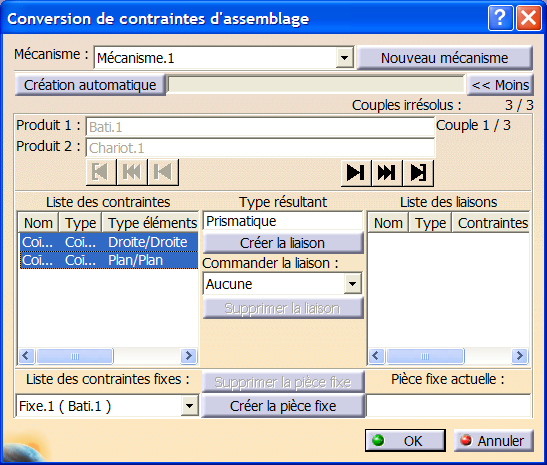
Figure 15
La contrainte de distance entre l'extrémité du Levier et le centre du cercle ne peut pas être convertie, ignorez-la.
Ajoutez manuellement une liaison Point sur Courbe, mais il faut construire au préalable un objet point dans le levier.

Figure 16
Commandez la liaison glissière, dénommée Prismatique, entre le Bati et le Chariot, les limites seront -100 mm à +100 mm.

Figure 17


Figure 18

Figure 19


Figure 20
Lancez une simulation.
En premier, il faut déplacer le curseur de la commande sur la position -100, puis  une étape, ainsi que régler les intervalles pour les positions de cette étape.
une étape, ainsi que régler les intervalles pour les positions de cette étape.
Ici il n'y aura qu'une seule étape pour les 200 mm, avec un pas de 0.02 soit 4 mm pour balayer cette étape, ne mettez pas plusieurs étapes.
Ceci va créer une expérience Expérience.1 dans l'arbre du modèle.
Animez le modèle, sur un aller ou en boucle.
Ici c'est l'arc de cercle qui impose le mouvement du Levier, dans notre mécanisme ce n'est pas ainsi, il faut que ce soit le levier qui impose à la plaque de plexiglas de se plaquer sur le gabarit.
Dans le corps de pièce Schema du Levier, créez un point à 25 mm sur le segment, on supposera que c'est ce point qui est guidé par une came liée au Bati.

Figure 21
Définissez une loi de déplacement du Chariot par rapport au Bati en fonction du temps, c'est une condition pour pouvoir trouver le profil de la came.
Lier le paramètre Mécanisme.1\Commandes\Commande.1\Angle au paramètre temps de Catia Mécanisme.1\KINTime.

Figure 22
Lancez une Simulation suivant des lois.

Figure 23
On remarque que la partie utile du mouvement sera comprise entre 0 et 5s, modifiez l'intervalle de temps.
Déterminez la trace du point du Levier.

Figure 24
Visualisez la courbe représentative de cette trace, il s'agit d'une spline comprenant 101 points de définition, cachez ces points.

Figure 25
Maintenant vous allez supprimer la liaison Point sur Courbe mise en place en début d'étude cinématique, et en installer une autre mais entre le point milieu du Levier et la spline.

Figure 26
Raccourcissez le Levier de 5 mm.
Supprimez la contrainte de distance entre le Bati et le Levier.
Animez le mécanisme et constatez que c'est bien la spline qui pilote le Levier.
4- Les volumes
Maintenant que le mécanisme est validé par son squelette, nous allons mettre de la matière aux différentes pièces. Ici nous le ferons simplement au niveau de la came du Bati.
Modélisez un parallélépipède de section définie sur la Figure 27, l'extrusion sera de 20 mm en X négatif.

Figure 27
Méthode 1
Une idée simple consiste à faire une esquisse rectangulaire sur la face perpendiculaire à une des extrémités de la spline, la largeur de ce rectangle étant le rayon de la fraise d'usinage ou du galet de fonctionnement, puis de créer une rainure. Cette méthode fonctionne avec une fraise de diamètre 4 mm mais pas avec une fraise de diamètre 6 mm. Observez le point de rebroussement si on prend une fraise de diamètre 10.
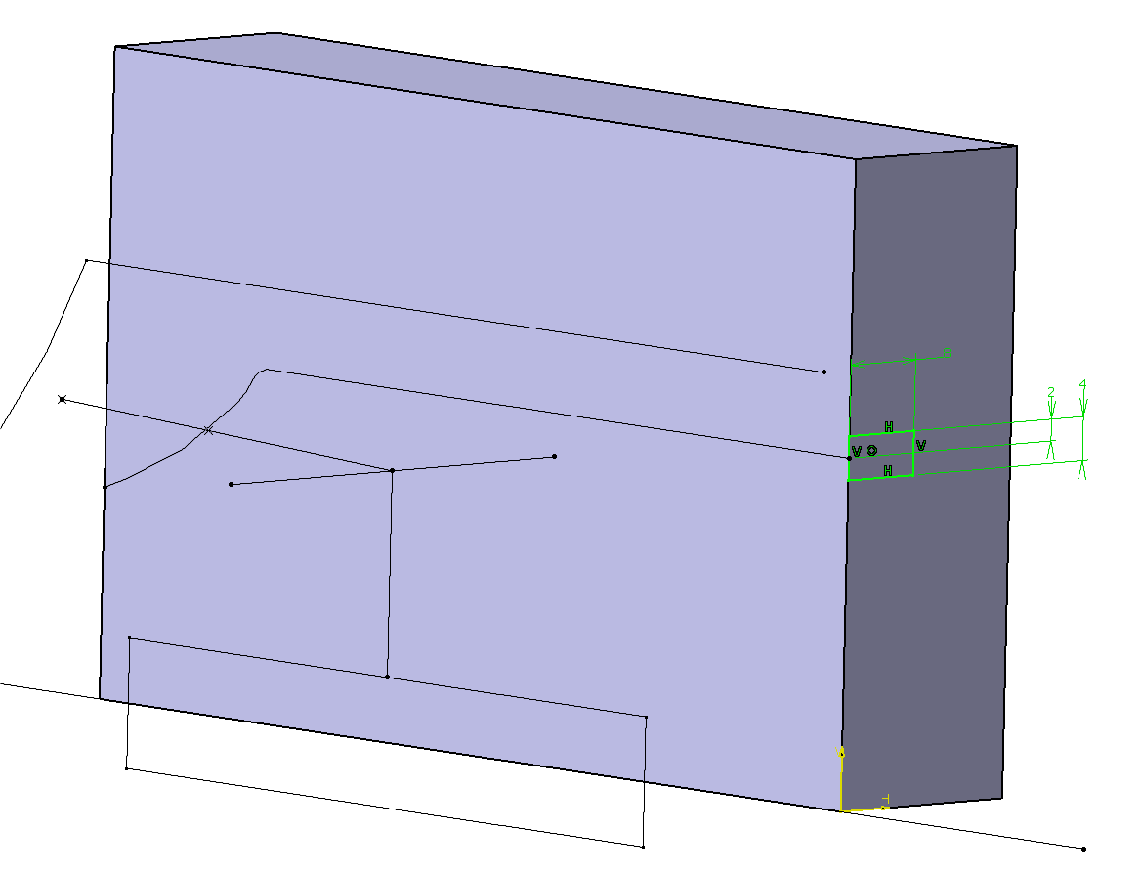
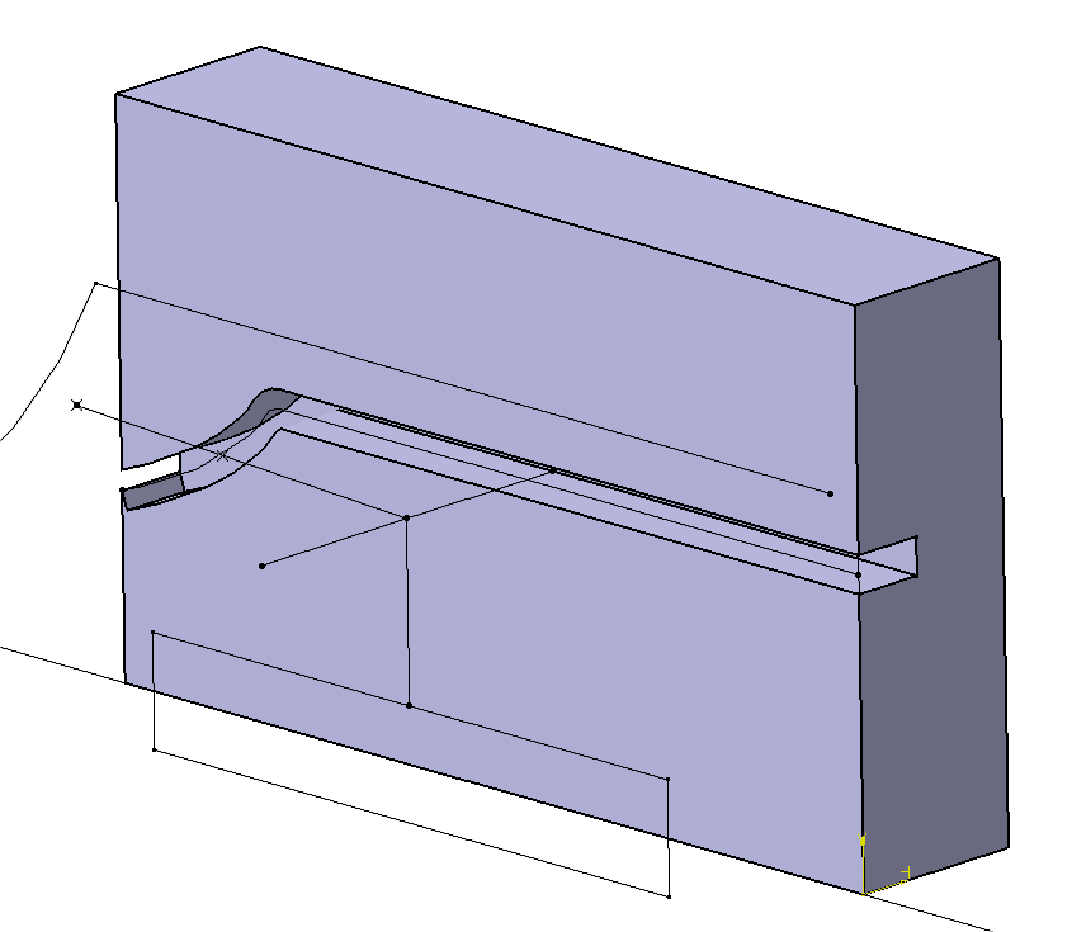

Figure 28
Nous allons donc devoir utiliser une autre méthode.
Supprimez l'esquisse rectangulaire précédente.
Méthode 2
Le galet ou la fraise va générer une enveloppe dont les bords seront à une distance égale au rayon par rapport à la spline.
Depuis l'atelier Generative Shape Design, tracer les courbes décalées de 5 mm de chaque côté de la spline, si 5 est le rayon du galet, utilisez la commande Courbe Parallèle.
Faites de même avec un décalage de -5mm afin d'avoir l'autre côté de l'enveloppe.

Figure 29

Figure 30
Vous pouvez constater que le décalage donne un angle vif sur la seconde courbe décalée, il n'y a plus de rebroussement.
Par contre on constate que la seconde courbe ne va pas jusqu'à la face de la pièce, utilisez une extrapolation pour corriger ceci.

Figure 31
Faites ensuite 2 segments afin de clore cette zone.

Figure 32
Avec cette zone fermée, il est possible de créer une surface de remplissage.

Figure 33
Depuis l'atelier Part, créez un corps de pièce dans la pièce Bati.
Définissez ce corps de pièce comme objet de travail.
Créez une surface épaisse à partir de la surface de remplissage précédente, suivant -X.

Figure 34
Faites un retrait de ce corps de pièce par rapport au corps de pièce principal.
Cachez les éléments inutiles.
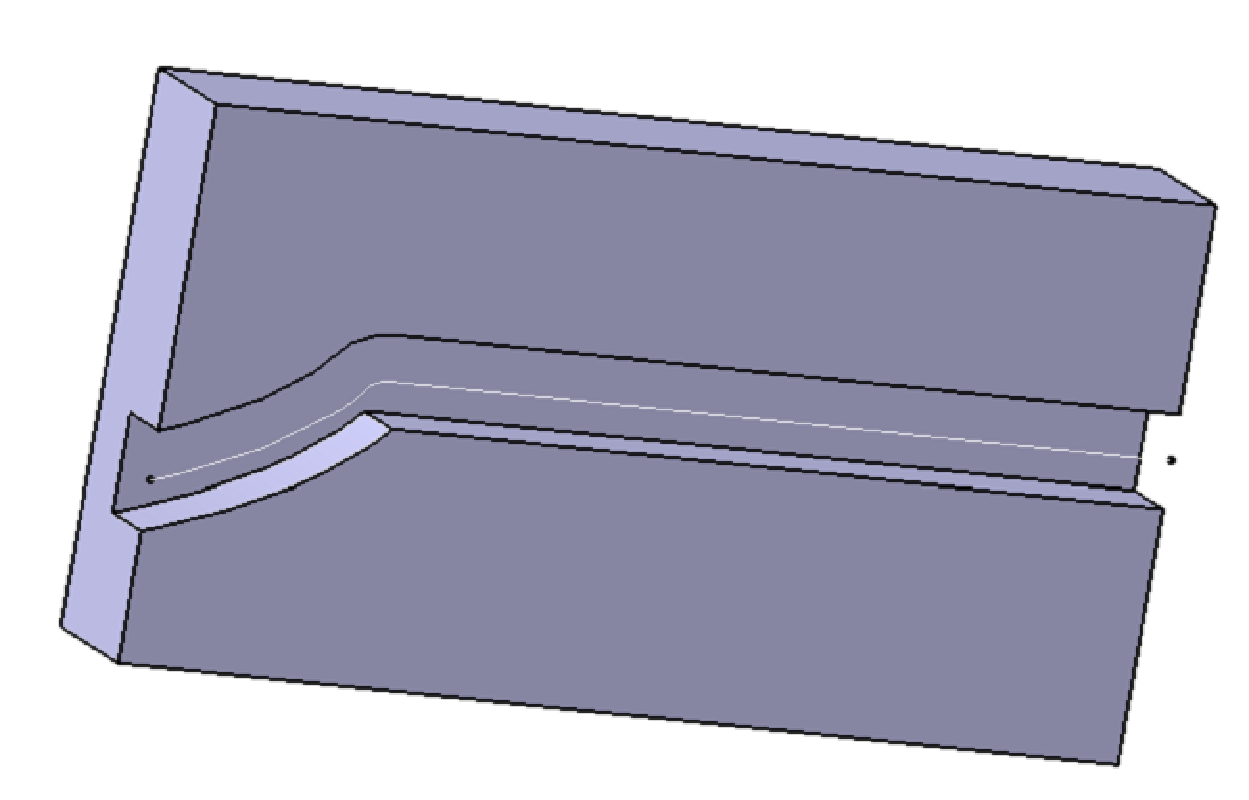
Figure 35
Cette méthode est fiable mais un peu complexe.
Désactivez le retrait du corps de pièce.
Méthode 3
Cliquez sur la spline et depuis l'atelier Part, lancez la construction d'une poche.
Cochez Epaissir et définissez la Profondeur et les 2 Epaisseurs.

Figure 36

Figure 37
Il reste à supprimer ici le petit morceau restant, mais dans cette zone, on devra seulement permettre au galet de s'échapper, donc la forme aura une importance relative, de plus si la pièce était plus courte ce petit morceau ne subsisterait pas.
Le plus simple pour ne pas avoir ce petit morceau consiste à extrapoler la spline, puis de faire la dernière poche avec la spline extrapolée.
Cette méthode ne donne pas complètement satisfaction au niveau du changement de mouvement du Levier.
Si on esquisse un cercle de diamètre 10 mm, on remarque une anomalie.

Figure 38
Il reste à créer le volume du Galet par exemple et vérifier qu'il n'y a pas d'interférence entre celui-ci et le Bati au niveau de la came.

Figure 39
Commentaires
Enregistrer un commentaire