Les matériaux intelligents
Les matériaux intelligents
Définition des matériaux intelligents :
Les matériaux intelligents ou "smart materials" sont de plus en plus sujets de recherche dans de nombreux domaines scientifiques. Elles sont innovantes et permettent le développement de technologies dans des domaines très divers tels que l’informatique, la robotique et le médical.
Un matériau intelligent est sensible, adaptatif et évolutif. Il s’oppose au matériau classique, inerte par définition, car ses caractéristiques restent toujours les mêmes quelques soient les sollicitations auxquelles ce matériau est soumis. Il possède des fonctions qui lui permettent de se comporter comme un capteur (détecter des signaux), un actionneur (effectuer une action sur son environnement) ou parfois comme un processeur (traiter, comparer, stocker des informations). Ce matériau est capable de modifier spontanément ses propriétés physiques, notamment sa forme, sa connectivité, sa viscosité ou sa couleur, en réponse à des excitations naturelles ou provoquées. Celles-ci peuvent venir de l'extérieur ou de l'intérieur dumatériau : variations de température, de contraintes mécaniques, de champs électriques ou magnétiques. Le matériau va donc adapter sa réponse, signaler une modification apparue dans l'environnement et dans certains cas, provoquer une action de correction. Il devient ainsi possible de détecter des faiblesses de structure dans le revêtement d'un avion, des fissures apparaissant dans un bâtiment ou un barrage en béton.
Les différents matériaux intelligents sont divisés en trois catégories qui connaissent de nombreuses applications dans des secteurs divers : les Alliages à Mémoire de Forme (AMF), les matériaux piézoélectriques, et magnétostrictifs.
Différents types des matériaux intelligents :
Les Alliages à Mémoire de Forme
Définition
Les alliages à mémoire de forme sont communément appelés AMF (en anglais SMA pour Shape Memory alloy). Ils sont, de nos jours, de plus en plus connus et utilisés. Plusieurs applications ont vu le jour au cours des dernières décennies dans plusieurs domaines tels que, le domaine biomédical, l’aérospatiale, la robotique et bien d’autres. Dans tous ces domaines d’application, les AMF sont utilisés soit pour leur propriété de mémoire de forme, soit pour leur propriété superélastique, soit pour leur effet amortissant. Malgré le fait qu’ils soient de plus en plus connus et utilisés, ils demeurent coûteux comparativement aux autres matériaux plus communs. Par contre, dans certaines situations, ils peuvent devenir économiquement rentables puisqu’il est possible de remplacer des dispositifs très complexes par un simple dispositif d’AMF.
Famille d’alliage
Il existe plusieurs familles d’AMF. Les plus connues sont les alliages titane-nickel (Ti-Ni) et les alliages cuivreux (Cu-Zn-Al, Cu-Al-Ni, Cu-Al-Be), car ils possèdent de bonnes propriétés thermomécaniques tout en ayant des prix industriellement compétitifs. À l’opposé, les alliages d’or (Au-Cd, Cu-Au-Zn) et d’argent (Ag-Cd) sont coûteux et n’ont donc que des intérêts scientifiques puisqu’ils ne sont pas commercialisables. Finalement, ils existent des alliages de Fer (Fe-Mn-Cr-Ni-Si, Fe-Cr-Ni-Co-Mn-Si) peu coûteux, mais possédantes des propriétés thermomécaniques plutôt limitées. De plus, même avec l’ajout de chrome, ces alliages ne supportent pas bien les milieux corrosifs.
Notion de base
Les AMF doivent leurs caractéristiques à la présence de deux phases à l’état solide.
Comme pour l’acier, la phase basse température est appelée martensite tandis que la phase haute température, dite phase mère, est appelé austénite. Le changement de phase dans les aciers et les alliages à mémoire de forme est similaire. La transformation martensitique :
1. est sans diffusion, c’est-à-dire que les atomes ne se déplacent pas sur de longues distances.
2. implique une déformation homogène du réseau qui conduit à un changement de forme macroscopique.
3. est caractérisée par une déformation déviatorique, c’est-à-dire sans changement de volume.
Cependant, une analyse détaillée de la transformation des alliages à mémoire de forme publie qu’il y a un léger changement de volume. Par contre, ce dernier est très faible comparé au changement de forme. La transformation est donc quand même considérée martensitique.
Toutefois, contrairement aux aciers, les températures de transformation sont beaucoup plus basses et se situent entre moins 100 et plus 200 degrés Celsius selon l’alliage utilisé. Ces températures de transition dépendent aussi de l’historique de l’alliage, c’est-à-dire des traitements thermomécaniques ou des procédés de fabrication, ou encore de la combinaison des deux. De plus, il y a quatre températures qui caractérisent les AMF : les températures de début et de fin de transformation inverse, pour austénite START As et Af pour austénite finish, ainsi que les températures de début et de fin de transformation directe, Ms pour martensite START et Mf pour martensite finish. Finalement, ces quatre températures dépendent de la contrainte appliquée, mais heureusement, elles varient linéairement. Voici donc, à la figure I.1, un diagramme d’état simplifié représentant bien un AMF.

Figure I.1 : Diagramme de phase simplifiée.
Bien qu’il existe certains alliages possédant As < Ms, il sera plus facile de comprendre les concepts de base en considérant Mf < Ms < As < Af, comme l’illustre la figure I.1. On retrouve donc pour T < Mf, représenté par la zone 1, 100 % de martensite. À l’opposé, pour T > Af représenté par la zone 2, on retrouve 100 % d’austénite. Entre les deux zones, on retrouve une coexistence des deux phases. La proportion dépend alors des conditions de chargement thermique et/ou mécanique antérieures. Finalement, le dernier concept important pour comprendre les propriétés des AMF réside dans le fait que l’austénite a un réseau cristallin cubique et que la martensite a un réseau monoclinique comme à la figure I.2.

Figure I.2 : Structure atomique de l’austénite et de la martensite.
Sans élaborer plus profondément sur le sujet, on peut représenter conceptuellement en
2D l’austénite par un carré et la martensite par un parallélogramme qui représente le cisaillement créé lors de la transformation (figure I.3). Cette analogie est fort utile pour
expliquer les phénomènes de transformation décrits dans les sections suivantes.

Figure I.3 : Schématisation en 2D de l’austénite et de la martensite.
Puisqu’ils n’ont pas la même structure cristalline, ils ont, par le fait même, des propriétés différentes. D’ailleurs, la majorité des auteurs utilisent des propriétés différentes.
L’auteur David John Barrett propose dans son article des modules de Young et des coefficients thermiques différents pour l’austénite et la martensite. Ces données se retrouvent dans la table I.2.

Table I.2: Exemple de différence entre les propriétés de l’austénite et de la martensite.

Effet mémoire de forme :
L’effet mémoire de forme est le comportement le plus étonnant des AMF. D’ailleurs, c’est la raison pour laquelle on appelle ces alliages à mémoire de forme. Cet effet peut être représenté par une déformation importante qui ressemble à une plastification du matériau, c’est-à-dire que l’échantillon, après un chargement et un déchargement, ne retrouve pas sa forme initiale. Par contre, si le spécimen est par la suite chauffé, il y aura alors un retour de forme. Ce phénomène s’explique de la façon suivante. L’échantillon est d’abord composé entièrement d’austénite, comme le montre l’étape 1 de la figure I.6. Lors du refroidissement sans contrainte, toute l’austénite se transforme en martensite, mais de façon aléatoire (étape
2). Il y a donc une répartition uniforme dans tous les sens des variantes de martensite. On dit alors que la martensite est autoaccomodante. Il est à noter qu’à cette étape, il n’y a aucune déformation, le matériau a seulement changé de phase. Par la suite, si une force est appliquée, il y aura d’abord une déformation élastique 1 e (étape 3) suivie d’une réorientation de la martensite (étape 4). La force appliquée permet d’aligner toutes les variantes de martensite dans la même direction. On obtient de cette façon une grande déformation 2 e. C’est cette étape qui imite la plasticité puisque la martensite a changé de configuration. Elle porte donc maintenant le nom de martensite orientée.
Lors du relâchement de la force, il y aura bien sûr un retour élastique (e2-e3), mais la martensite restera orientée (étape 5). Finalement, lors d’un chauffage, la martensite se transformera en austénite et l’AMF retrouvera alors sa forme initiale. Puisque l’étape possède la même configuration que l’étape 1, il est possible d’effectuer ce cycle à plusieurs reprises. Si l’échantillon avait été fixé avant le chauffage, le retour aux conditions initiales n’aurait pu se produire. Il y aurait alors eu une génération de contraintes dans l’échantillon.
C’est d’ailleurs ces conditions qui permettent de créer des actionneurs en AMF performants.

Figure I.6 : Effet mémoire de forme étape par étape
Il existe différents types de courbe qui permettent d’obtenir l’effet mémoire de forme.
Le premier type correspond au chargement d’un AMF constitué entièrement de martensite, c’est-à-dire lorsque T < Mf. Il y a d’abord une déformation élastique proportionnelle au module de Young de la martensite Em, suivie de la réorientation de la martensite (figure I.7).
Figure I.7 : Mémoire de forme pour T < Mf
Un autre type (figure I.8) survient lorsque l’échantillon contient 100 % d’austénite et qu’il est

Figure I.7 : Mémoire de forme pour T < Mf
Un autre type (figure I.8) survient lorsque l’échantillon contient 100 % d’austénite et qu’il est

Figure I.7 : Mémoire de forme pour T
Un autre type (figure I.8) survient lorsque l’échantillon contient 100 % d’austénite et qu’il est refroidi entre Ms < T < As. Lors du chargement, l’échantillon a une déformation élastique selon les caractéristiques mécaniques de l’austénite (Ea). Par la suite, l’augmentation de la contrainte permet de traverser les droites de transformation de la martensite et donc d’effectuer un changement de phase qui génère de la martensite orientée (figure I.9). Lors du déchargement, le passage au travers de ces droites n’effectue aucun retour d’austénite puisque l’échantillon possède une température plus basse que la température As. L’échantillon reste donc en martensite et on obtient une déformation résiduelle.

Figure 1.8 : Mémoire de forme pour un échantillon 100% austénitique
Figure 1.9 : Diagramme d’état pour une reprise de forme qui débute avec Ms
Le dernier type de courbe contrainte-déformation est une combinaison des deux types précédents, c'est-à-dire que l’échantillon est amené entre Mf

Figure I.10 : Exemple typique d’effet mémoire de forme
Effet mémoire double sens :
L’effet mémoire double sens permet deux configurations différentes, une à haute température et une à basse température. Pour obtenir cet effet, l’AMF doit absolument être éduqué. Il existe plusieurs façons de le faire qui ont toutes le même objectif, c’est-à-dire d’introduire un réseau de dislocations dans le matériau. Ce réseau permet de favoriser de façon préférentielle la formation de certaines variantes de martensite lors du refroidissement sans contrainte. Il n’y a par conséquent plus de variante autoaccomodante et une déformation résiduelle apparaît alors. Pour la configuration à haute température, elle reprend toujours sa configuration initiale, comme à l’habitude. Par contre, il n’est pas possible d’obtenir la configuration à basse température sous contrainte. En effet, l’application de la contrainte domine l’effet du réseau de dislocation et, par conséquent, la martensite se transforme donc dans le sens de la contrainte. La martensite ainsi générée est de la martensite orientée. Il n’est donc pas possible de générer un travail au refroidissement.
Effet superélastique :
Pour obtenir un effet superélastique avec un AMF, il suffit de maintenir ce dernier à une température supérieure à Af. L’échantillon est donc au départ 100 % austénitique. Lorsque la contrainte augmente, les températures de transformation augmentent et il y a transformation d’austénite en martensite. Lors de l’abaissement de la contrainte, l’effet contraire se produit et l’échantillon retourne aux mêmes conditions initiales. Puisque les températures de début de transformation directe et inverse sont différentes, il y a nécessairement apparition d’une hystérésis comme le démontre bien la figure I.11.

Figure I.11 : Effet superélastique d’un alliage à mémoire de forme
Il est donc possible de séparer la courbe de contrainte–déformation en deux. La première partie est composée du chargement. Elle contient d’abord une déformation élastique de zéro à Ms qui répond à la loi de Hooke avec le module de Young de l’austénite. Par la suite, il y a transformation d’austénite en martensite orientée de Ms à Mf. Lorsque la transformation est complète à 100 %, il y a alors une troisième section qui est, encore une fois, une déformation élastique. Par contre, le module de Young est maintenant celui de la martensite. Pour le déchargement, les étapes sont les mêmes. L’ordre est simplement inversé et les contraintes critiques utilisées sont celles de l’austénite, c’est-à-dire As à Af .
Effet amortissant :
La capacité d’amortissement des AMF est très bonne. En effet, pour un matériau soumis
à une température inférieure à Ms, la réorientation des variantes de martensite permet de dissiper l’énergie. Ce phénomène est également appelé ferroélasticité. En effet, lorsque la contrainte passe successivement de la tension à la compression, on obtient une courbe qui est semblable à celle d’un matériau ferromagnétique plongé dans un champ magnétique.
Les applications des AMF :
Cette section contient quelques domaines d’applications ainsi que quelques exemples bien connus dans le milieu des alliages à mémoire de forme. Il est à noter qu’elle ne constitue pas une revue exhaustive de toutes les applications.
a) Secteur aérospatial :
L’industrie aérospatiale doit minimiser le volume et le poids de toutes leurs composantes afin de minimiser les coûts de lancement. Puisque les AMF offrent un rapport force / densité et énergie / poids excellent, ils sont des outils par excellence.
Le premier exemple est le télescope Hubble. Ce télescope, lancé en avril 1990
(Figure I.12), possédait des actionneurs en AMF (reprise de forme) pour le déploiement des panneaux solaires nécessaires à l’alimentation électrique des composantes électroniques.

Figure I.12 : Télescope Hubble
Le deuxième exemple est le satellite Clémentine. Lancé le 25 janvier 1994, ce satellite a déployé ses panneaux solaires en utilisant des boulons frangibolt développés par la compagnieTiNi Alloy Aerospace Inc. de San Leandro, Californie (voir figure I.13 et figure I.14). Ces boulons permettent d’éliminer les charges explosives utilisées auparavant qui nécessitaient des précautions spéciales pour le transport et l’entreposage. De plus, ces charges libéraient un gaz lors de l’explosion, ce qui peut faire dévier le satellite de sa trajectoire initiale.

Figure I.13 : Satellite Clémentine

Figure 1.14 : Frangibolt de la compagnie TiNi Alloy Aerospace Inc de San Leandro
Finalement, le dernier exemple est la célèbre station spatiale MIR. Après la chute de l’URSS, cette dernière est devenue la première station internationale. Dans un environnement hostile comme l’espace et avec l’absence de gravité, il est difficile d’assembler les modules de façon traditionnelle, comme par exemple le boulonnage, le rivetage, la soudure. En effet, le simple fait d’appliquer une force sur une clé afin de serrer un boulon repousse l’astronaute en direction opposée. L’idée développée pour contrer ce problème utilise les AMF. Ce procédé ressemble à un sertissage effectué avec un tube d’AMF. On déforme préalablement à froid le tube, on y insère à l’intérieur l’assemblage et on chauffe par infrarouge le tube. Il se contracte et sertit alors l’assemblage (voir figure I.15). Cette technique ressemble énormément à la première application des AMF, c’est-à-dire à celle du manchon de raccordement pour les conduites hydrauliques du chasseur américain, le F-14.

Figure 1.15 : Couplage thermomécanique
b) Secteur industriel :
Ce secteur, tout comme l’industrie aérospatiale, utilise également la reprise de forme des AMF afin de créer des actionneurs les plus compacts possible. Par contre, on utilise aussi les AMF pour leur effet amortissant et leur effet superélastique. En robotique, l’utilisation de microactionneurs est courante. Par exemple, la figure 1.16 montre une main artificielle utilisant les AMF.

Figure 1.16 : Micro actuateur pour la robotique
L’optométrie, avec ses lunettes (Figure I.17) à monture superélastique, est probablement l’exemple le plus connu. En effet, la superélasticité permet de grandes déformations et les lunettes deviennent alors pratiquement incassables.

Figure I.17 : Lunette avec monture superélastique
c) Secteur biomédical :
Ce secteur d’activité a des exigences très élevées par rapport aux matériaux utilisés.
D’ailleurs, ce secteur est probablement le plus actif de nos jours et il utilise particulièrement l’effet superélastique avec les alliages de nitinol qui sont évidemment biocompatibles.
Par exemple, les stents sont des dispositifs qui permettent une chirurgie minimalement invasive afin de contrer les problèmes cardiaques reliés à l’obstruction partielle des artères.
En effet, ce dispositif, une fois contracté, s’insère dans l’artère (voir figure I.18). Par la suite, lors du relâchement, l’effet superélastique contraint l’artère à retrouver le diamètre original et permet ainsi le passage du sang (voir figure I.19).

Figure I.18 : Stent cardiovasculaire comprimé --> cardiovasculaire relâché

Figure I.19 : Stent
Tout comme le stent, la valve cardiaque de la figure I.20 permet une chirurgie minimalement invasive, ce qui réduit les répercussions négatives sur le patient
Finalement, le dernier exemple du secteur biomédical est les broches d’orthodontie (Figure I.21). En effet, puisque les AMF ont un plateau sur l’hystérésis, la charge appliquée sur les dents reste constante pour une certaine plage de déformation. Cela permet au patient d’aller moins régulièrement chez son dentiste pour l’ajustement de son appareil dentaire.

Les matériaux piézoélectriques et électrostrictifs :
Ces matériaux présentent la faculté de se déformer sous l'application d'un champ électrique d'origine extérieure. Réciproquement, ils développent une polarisation électrique lorsqu'ils sont soumis à une contrainte mécanique.
Le phénomène de la piézoélectricité :
La piézoélectricité (1880, Pierre Curie) est la propriété que possèdent certains corps de se polariser électriquement sous l'action d'une force mécanique (effet direct) et, réciproquement, de se déformer lorsqu'on leur applique un champ électrique (effet inverse). Dans certains matériaux, comme le quartz, cet effet est naturellement observable. L'application d'une force provoque l'apparition d'un champ électrique (effet piézoélectrique direct), tandis que l'application d'un champ électrique provoque la déformation du matériau (piézoélectrique inverse). Cependant, la réalisation d'actionneurs repose sur l'utilisation de céramiques synthétiques polycristallines, fréquemment
constituées d'un alliage de plomb, de zirconium et de titanate [1,2,6], les céramiques PZT.
Les caractéristiques piézoélectriques de ces céramiques résultent de la polarisation initiale dans un champ électrique à température contrôlée. Les céramiques massives ainsi produites peuvent générer des contraintes de l'ordre de 40 MPa avec des déformées relatives de 1000 à 2000 ppm
Principales classes de matériaux :
a) Céramiques massives :
On distingue des céramiques dures, que l'on utilise pour des applications nécessitant l'application de tensions importantes (actionneurs) et des céramiques douces nécessitant des tensions plus réduites et plutôt adaptées à des applications faible puissance (petits actionneurs ou capteurs).
b) Céramiques multicouches :
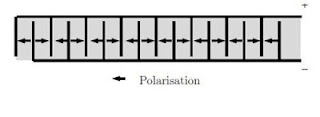
Afin de réduire les niveaux de tensions requis, sans pour autant limiter l'intensité du champ électrique, on peut avoir l'idée d'intercaler au sein du matériau un système d'électrodes de taille micrométrique. L'actionneur est alors constitué d'un empilement de plaques ou de disques de faible épaisseur entre lesquels sont intercalées des électrodes interdigitées permettant d'obtenir sous tension réduite (typiquement de l'ordre de 100 à 200 V) des valeurs de E et donc des déplacements relativement importants (Figure I.22).
Ainsi, des barreaux de céramique PXE54 de Morgan Electro-Ceramics (dimensions
5x5x47 mm, couches d'épaisseur 60μm) permettent d'obtenir sous une tension de 180 V des déplacements de l'ordre de 67μm et un effort bloqué de l'ordre de 1200N.
Afin d'obtenir des déplacements exploitables pour réaliser un actionneur, il s'avère alors nécessaire de trouver un dispositif d'amplification de ces déplacements micromé-triques. Soit l'actionneur est utilisé à la résonance, soit il faut prévoir une amplification mécanique des déplacements (type bras de levier). Par ailleurs, il est possible de cumuler dans le temps ces déplacements micrométriques à haute fréquence (moteurs piézoélectriques) [13].
c) Composites piézoélectriques :
De manière générale, les actionneurs constitués de céramiques massives ou multicouches présentent l'inconvénient d'être fortement cassants : il est par exemple fort peu recommandé de faire travailler une céramique multicouches en traction ou en torsion, et le montage mécanique doit donc éviter l'application de tout effort mécanique autre qu'une compression.
Par conséquent, l'utilisation de ces actionneurs est moins adaptée à des structures où l'application des efforts se fait selon des géométries complexes.
C'est pourquoi les fibres piézoélectriques offrent de nouvelles possibilités pour la conception d'actionneurs piézoélectriques avec une bonne conformabilité. Des fibres piézoélectriques sont prises dans une matrice souple, et des électrodes placées sur un film polymère permettent d'appliquer le champ électrique. De telles fibres piézoélectriques permettent d'obtenir des déformées de l'ordre de 2000 ppm dans la direction longitudinale
[14]. Il est ainsi possible de créer un actionnement quasi-unidirectionnel du fait de la structure composite, et l'actionneur peut s'adapter à des géométries plus complexes.

Les performances intrinsèques atteintes par les composites sont fortement dépendantes de la densité de fibres piézoélectriques (actives) au sein de la matrice polymère (passive).
Ci-dessus, un exemple de composite à fibres PZT 5H [7] permettant d'atteindre des déformées de l'ordre de 2000 ppm sous forte tension.
Les fibres piézocomposites disponibles commercialement permettent sous des tensions de l'ordre de 1500 V en direct et 500 V en inverse d'obtenir des déformées relatives de l'ordre de 2000 ppm (Figure I.23 et 24).
D'après les données fournies par le fabricant, l'effort bloqué serait de l'ordre de 30 à 40 Mpa, ce qui est tout à fait comparable aux valeurs caractérisant les composés massifs ou multicouches.
Application
a) Des structures quasi-statiques :
La réalisation d'actionneurs quasi-statiques à base de céramiques multicouches suppose un dispositif d'ampliation externe des déplacements. Il est fait appel le plus souvent à des bras de levier ou à des structures métalliques de précontrainte et d'ampliation, comme les extenseurs développés par la société CEDRAT Technologies [15]. Il est ainsi possible d'exploiter des céramiques produisant des déplacements d'ordre micrométrique et des efforts bloqués de l'ordre du kN pour concevoir des actionneurs produisant des déformations de quelques dixièmes de mm avec des efforts bloqués plus faibles.

Une autre classe d'actionneurs piézoélectriques exploite un substrat de matériau passif pour produire des déplacements ampliqués : les bimorphes.
Contrairement aux structures précédentes, qui exploitent l'effet longitudinal, ces structures exploitent l'effet transverse. Ces actionneurs permettent de produire des déplacements relativement importants (de l'ordre du mm), mais en exerçant des efforts très réduits (quelques N). Une couche de céramique piézoélectrique est collée sur un substrat métallique. L'application d'une tension a pour effet d'appliquer un moment de flexion sur la lame métallique qui va donc se courber.
Une autre méthode pour produire des déplacements consiste à cumuler à haute fréquence un grand nombre de déplacements microscopiques : c'est le principe de fonctionnement des moteurs piézoélectriques quasi-statiques.
b) Des structures résonnantes :
Les actionneurs exploitant des céramiques multicouches ou des bimorphes peuvent également être sollicités à des fréquences correspondant aux modes de résonance de la structure pour obtenir une amplification significative des déformations disponibles. D'autres structures sont quant à elles typiquement résonantes, comme les transducteurs de type Langevin. Il s'agit d'actionneurs constitués de disques de céramiques piézoélectriques placés entre deux contremasses métalliques et alimentés pour exciter les contremasses à la résonance mécanique, ce qui permet de produire des vibrations d'amplitude significative .

Par ailleurs, des structures de moteurs piézoélectriques sont basées sur des phénomènes de résonance, comme les moteurs à onde progressive (moteurs créant une onde vibratoire de surface sur le stator permettant l'entraînement du rotor par frottement).
Il s'agit là de moteurs particulièrement adaptés à des applications de type fort couple
basse/vitesse permettant d'exploiter avantageusement la forte densité de puissance massique des céramiques piézoélectriques.
Les matériaux magnétostrictifs :
Définition :
Les alliages magnétostrictifs sont au champ magnétique ce que les piézoélectriques sont au champ électrique. Sous l’effet d’un champ magnétique, un barreau de fer s’allonge tandis qu’il subit une striction dans le sens transversal. Inversement, l’effet Villari correspond à l’aimantation du barreau sous l’effet d’un allongement. Selon la géométrie considérée, il est aussi possible d’exploiter des déformations en flexion ou en torsion.
Seuls les alliages de Fer et de Terres rares, tel que le Terfenol-D, permettent d’obtenir des déformations importantes, de l’ordre de 1000 à 2000 ppm, soit 10 à 50 fois supérieures à celles obtenus avec les métaux. Bien que ces déformations soient légèrement plus importantes que celles obtenues avec les piézoélectriques, elles sont plus difficiles à mettre en jeu du fait de la perméabilité relativement faible des matériaux (4 dans le cas du Terfenol-D).
Ces alliages pourraient être intéressants dans la réalisation de moteurs à effort élevé et faible vitesse.
Magnétisme en L'absence d'excitation
Pour comprendre et interpréter l’évolution de la structure magnétique d’un matériau, il est nécessaire de remonter à l’échelle atomique, puis progressivement de passer à l’échelle de l’arrangement d’atomes puis du cristal et enfin de la pièce.
Magnétisme à l'échelle atomique
Toute substance matérielle est formée d’un ensemble d’atomes. Chaque atome est composé d’un noyau autour duquel gravite un certain nombre d’électrons. Les particules constituant le noyau et les électrons sont chargées et perpétuellement en mouvement, ce qui crée des moments magnétiques qui sont à l’origine des propriétés magnétiques des corps.
Le moment magnétique électronique provient d’une part des mouvements des électrons autour du noyau sur leurs orbites et d’autre part de la rotation spinale de chaque électron l’ordre de grandeur est de 1023 Am2 [41].
Le moment magnétique dû aux mouvements des composants du noyau est beaucoup plus faible. Chaque atome possède donc un moment magnétique élémentaire dont la direction et le module dépendent de l’environnement particulier de l’atome (nature et position, ...).

Du point de vue magnétique, chaque atome peut donc être considéré comme un petit aimant élémentaire. Pour le fer, il se trouve que ce moment magnétique élémentaire est particulièrement important.
Magnétisme à l'échelle de l'agrégat d'atomes
Lorsque des atomes s’assemblent, les moments magnétiques de chacun d’eux interagissent plus ou moins entre eux ce qui conduit, en magnétisme, à classer les matériaux en cinq grandes catégories : les diamagnétiques, les paramagnétiques, les ferromagnétiques, les ferrimagnétiques et les antiferromagnétiques.
Finalement, le dernier exemple du secteur biomédical est les broches d’orthodontie (Figure I.21). En effet, puisque les AMF ont un plateau sur l’hystérésis, la charge appliquée sur les dents reste constante pour une certaine plage de déformation. Cela permet au patient d’aller moins régulièrement chez son dentiste pour l’ajustement de son appareil dentaire.

Figure I.21 : Broche d’orthodontie
Les matériaux piézoélectriques et électrostrictifs :
Ces matériaux présentent la faculté de se déformer sous l'application d'un champ électrique d'origine extérieure. Réciproquement, ils développent une polarisation électrique lorsqu'ils sont soumis à une contrainte mécanique.
Le phénomène de la piézoélectricité :
La piézoélectricité (1880, Pierre Curie) est la propriété que possèdent certains corps de se polariser électriquement sous l'action d'une force mécanique (effet direct) et, réciproquement, de se déformer lorsqu'on leur applique un champ électrique (effet inverse). Dans certains matériaux, comme le quartz, cet effet est naturellement observable. L'application d'une force provoque l'apparition d'un champ électrique (effet piézoélectrique direct), tandis que l'application d'un champ électrique provoque la déformation du matériau (piézoélectrique inverse). Cependant, la réalisation d'actionneurs repose sur l'utilisation de céramiques synthétiques polycristallines, fréquemment
constituées d'un alliage de plomb, de zirconium et de titanate [1,2,6], les céramiques PZT.
Les caractéristiques piézoélectriques de ces céramiques résultent de la polarisation initiale dans un champ électrique à température contrôlée. Les céramiques massives ainsi produites peuvent générer des contraintes de l'ordre de 40 MPa avec des déformées relatives de 1000 à 2000 ppm
Principales classes de matériaux :
a) Céramiques massives :
On distingue des céramiques dures, que l'on utilise pour des applications nécessitant l'application de tensions importantes (actionneurs) et des céramiques douces nécessitant des tensions plus réduites et plutôt adaptées à des applications faible puissance (petits actionneurs ou capteurs).
b) Céramiques multicouches :
Afin de réduire les niveaux de tensions requis, sans pour autant limiter l'intensité du champ électrique, on peut avoir l'idée d'intercaler au sein du matériau un système d'électrodes de taille micrométrique. L'actionneur est alors constitué d'un empilement de plaques ou de disques de faible épaisseur entre lesquels sont intercalées des électrodes interdigitées permettant d'obtenir sous tension réduite (typiquement de l'ordre de 100 à 200 V) des valeurs de E et donc des déplacements relativement importants (Figure I.22).

Figure I.22 : Constitution d'une céramique multicouche
Ainsi, des barreaux de céramique PXE54 de Morgan Electro-Ceramics (dimensions
5x5x47 mm, couches d'épaisseur 60μm) permettent d'obtenir sous une tension de 180 V des déplacements de l'ordre de 67μm et un effort bloqué de l'ordre de 1200N.
Afin d'obtenir des déplacements exploitables pour réaliser un actionneur, il s'avère alors nécessaire de trouver un dispositif d'amplification de ces déplacements micromé-triques. Soit l'actionneur est utilisé à la résonance, soit il faut prévoir une amplification mécanique des déplacements (type bras de levier). Par ailleurs, il est possible de cumuler dans le temps ces déplacements micrométriques à haute fréquence (moteurs piézoélectriques) [13].
c) Composites piézoélectriques :
De manière générale, les actionneurs constitués de céramiques massives ou multicouches présentent l'inconvénient d'être fortement cassants : il est par exemple fort peu recommandé de faire travailler une céramique multicouches en traction ou en torsion, et le montage mécanique doit donc éviter l'application de tout effort mécanique autre qu'une compression.
Par conséquent, l'utilisation de ces actionneurs est moins adaptée à des structures où l'application des efforts se fait selon des géométries complexes.
C'est pourquoi les fibres piézoélectriques offrent de nouvelles possibilités pour la conception d'actionneurs piézoélectriques avec une bonne conformabilité. Des fibres piézoélectriques sont prises dans une matrice souple, et des électrodes placées sur un film polymère permettent d'appliquer le champ électrique. De telles fibres piézoélectriques permettent d'obtenir des déformées de l'ordre de 2000 ppm dans la direction longitudinale
[14]. Il est ainsi possible de créer un actionnement quasi-unidirectionnel du fait de la structure composite, et l'actionneur peut s'adapter à des géométries plus complexes.

Figure I.23 : Schéma de principe de constitution d'un piézocomposite
Les performances intrinsèques atteintes par les composites sont fortement dépendantes de la densité de fibres piézoélectriques (actives) au sein de la matrice polymère (passive).
Ci-dessus, un exemple de composite à fibres PZT 5H [7] permettant d'atteindre des déformées de l'ordre de 2000 ppm sous forte tension.
Les fibres piézocomposites disponibles commercialement permettent sous des tensions de l'ordre de 1500 V en direct et 500 V en inverse d'obtenir des déformées relatives de l'ordre de 2000 ppm (Figure I.23 et 24).
D'après les données fournies par le fabricant, l'effort bloqué serait de l'ordre de 30 à 40 Mpa, ce qui est tout à fait comparable aux valeurs caractérisant les composés massifs ou multicouches.
Application
a) Des structures quasi-statiques :
La réalisation d'actionneurs quasi-statiques à base de céramiques multicouches suppose un dispositif d'ampliation externe des déplacements. Il est fait appel le plus souvent à des bras de levier ou à des structures métalliques de précontrainte et d'ampliation, comme les extenseurs développés par la société CEDRAT Technologies [15]. Il est ainsi possible d'exploiter des céramiques produisant des déplacements d'ordre micrométrique et des efforts bloqués de l'ordre du kN pour concevoir des actionneurs produisant des déformations de quelques dixièmes de mm avec des efforts bloqués plus faibles.

Figure 1.25 : Exemple de cycle de fonctionnement d'un film piézocomposite produit par Smart material corporation
Une autre classe d'actionneurs piézoélectriques exploite un substrat de matériau passif pour produire des déplacements ampliqués : les bimorphes.
Contrairement aux structures précédentes, qui exploitent l'effet longitudinal, ces structures exploitent l'effet transverse. Ces actionneurs permettent de produire des déplacements relativement importants (de l'ordre du mm), mais en exerçant des efforts très réduits (quelques N). Une couche de céramique piézoélectrique est collée sur un substrat métallique. L'application d'une tension a pour effet d'appliquer un moment de flexion sur la lame métallique qui va donc se courber.
Une autre méthode pour produire des déplacements consiste à cumuler à haute fréquence un grand nombre de déplacements microscopiques : c'est le principe de fonctionnement des moteurs piézoélectriques quasi-statiques.
b) Des structures résonnantes :
Les actionneurs exploitant des céramiques multicouches ou des bimorphes peuvent également être sollicités à des fréquences correspondant aux modes de résonance de la structure pour obtenir une amplification significative des déformations disponibles. D'autres structures sont quant à elles typiquement résonantes, comme les transducteurs de type Langevin. Il s'agit d'actionneurs constitués de disques de céramiques piézoélectriques placés entre deux contremasses métalliques et alimentés pour exciter les contremasses à la résonance mécanique, ce qui permet de produire des vibrations d'amplitude significative .

Figure 1.26 : Schéma de principe de fonctionnement d'un bimorphe
Par ailleurs, des structures de moteurs piézoélectriques sont basées sur des phénomènes de résonance, comme les moteurs à onde progressive (moteurs créant une onde vibratoire de surface sur le stator permettant l'entraînement du rotor par frottement).
Il s'agit là de moteurs particulièrement adaptés à des applications de type fort couple
basse/vitesse permettant d'exploiter avantageusement la forte densité de puissance massique des céramiques piézoélectriques.
Les matériaux magnétostrictifs :
Définition :
Les alliages magnétostrictifs sont au champ magnétique ce que les piézoélectriques sont au champ électrique. Sous l’effet d’un champ magnétique, un barreau de fer s’allonge tandis qu’il subit une striction dans le sens transversal. Inversement, l’effet Villari correspond à l’aimantation du barreau sous l’effet d’un allongement. Selon la géométrie considérée, il est aussi possible d’exploiter des déformations en flexion ou en torsion.
Seuls les alliages de Fer et de Terres rares, tel que le Terfenol-D, permettent d’obtenir des déformations importantes, de l’ordre de 1000 à 2000 ppm, soit 10 à 50 fois supérieures à celles obtenus avec les métaux. Bien que ces déformations soient légèrement plus importantes que celles obtenues avec les piézoélectriques, elles sont plus difficiles à mettre en jeu du fait de la perméabilité relativement faible des matériaux (4 dans le cas du Terfenol-D).
Ces alliages pourraient être intéressants dans la réalisation de moteurs à effort élevé et faible vitesse.
Magnétisme en L'absence d'excitation
Pour comprendre et interpréter l’évolution de la structure magnétique d’un matériau, il est nécessaire de remonter à l’échelle atomique, puis progressivement de passer à l’échelle de l’arrangement d’atomes puis du cristal et enfin de la pièce.
Magnétisme à l'échelle atomique
Toute substance matérielle est formée d’un ensemble d’atomes. Chaque atome est composé d’un noyau autour duquel gravite un certain nombre d’électrons. Les particules constituant le noyau et les électrons sont chargées et perpétuellement en mouvement, ce qui crée des moments magnétiques qui sont à l’origine des propriétés magnétiques des corps.
Le moment magnétique électronique provient d’une part des mouvements des électrons autour du noyau sur leurs orbites et d’autre part de la rotation spinale de chaque électron l’ordre de grandeur est de 1023 Am2 [41].
Le moment magnétique dû aux mouvements des composants du noyau est beaucoup plus faible. Chaque atome possède donc un moment magnétique élémentaire dont la direction et le module dépendent de l’environnement particulier de l’atome (nature et position, ...).

Figure I-27 : Le moment magnétique élémentaire au niveau atomique
Du point de vue magnétique, chaque atome peut donc être considéré comme un petit aimant élémentaire. Pour le fer, il se trouve que ce moment magnétique élémentaire est particulièrement important.
Magnétisme à l'échelle de l'agrégat d'atomes
Lorsque des atomes s’assemblent, les moments magnétiques de chacun d’eux interagissent plus ou moins entre eux ce qui conduit, en magnétisme, à classer les matériaux en cinq grandes catégories : les diamagnétiques, les paramagnétiques, les ferromagnétiques, les ferrimagnétiques et les antiferromagnétiques.
Les alliages ferreux étant ferromagnétiques à basse température (en dessous de la température de CURIE) et paramagnétique au-dessus.
a) Le paramagnétisme :
Si les interactions entre les moments magnétiques des atomes sont faibles devant l’agitation thermique, les interactions deviennent négligeables. En l’absence d’excitation extérieure, une répartition aléatoire des moments magnétiques élémentaires est obtenue. Dans le cas d’une excitation magnétique extérieure, les moments magnétiques atomiques tendent à s’aligner le long des lignes de champ magnétique extérieur. L’aimantation est proportionnelle à l’excitation appliquée H :

Le paramagnétisme est sensible à la température. La susceptibilité initiale est positive et devient infinie au zéro absolu. Elle décroît lorsque la température augmente.
b) Le ferromagnétisme :
Si la température est relativement faible et si les moments atomiques des atomes sont relativement importants (cas du fer et du nickel à température ambiante), lors d’un rassemblement d’atomes (agrégat), les moments magnétiques ont tendance à s’arranger parallèlement entre eux et il en résulte pour l’agrégat une aimantation spontanée.
L’induction magnétique B représente l’état magnétique en fonction de l’environnement magnétique exprimé par le champ H et de son état d’aimantation exprimé par M.

L’aimantation spontanée dépend de la température ; elle décroît si la température augmente. Au-dessus de la température de CURIE, le matériau retrouve un comportement paramagnétique.

Figure I.28 : Type de magnétisme (cas du fer)
Ferromagnétisme à l'échelle macroscopique
Pour le Fer, qui cristallise dans le système cubique centré, l’alignement des moments magnétiques se fait évidemment dans des directions présentant une grande densité d’atomes directions de type (1, 0,0) appelées «directions de facile aimantation.
Il faut noter que, pour un même cristal cubique centré, il existe trois directions équivalentes. Un cristal ferromagnétique devrait donc être caractérisé par une aimantation spontanée. Or, les échantillons macroscopiques mêmes monocristallins peuvent être complètement désaimantés. Pour expliquer ce phénomène, WEISS introduit le concept de domaines (Figure I.29).
A ce stade, la matière ferromagnétique présente donc une microstructure magnétique à une échelle légèrement inférieure à celle cristalline. Elle est composée de domaines élémentaires appelés domaines de WEISS au sein desquels l’aimantation est orientée selon l’une ou l’autre des directions de facile aimantation.
En l’absence de champ appliqué et de toute autre sollicitation extérieure, il y a statistiquement équipartition du volume des domaines entre les diverses directions ; à l’échelle macroscopique, l’aimantation résultante est donc bien nulle, comme il est observé.
Ce concept, introduit par WEISS, s’est avéré correspondre à la structure réellement observée depuis par différentes techniques. Un cristal de fer; il est divisé en vastes domaines principaux de direction de magnétisations antiparallèles. Ils sont terminés par des domaines plus petits dits de fermeture. Les domaines sont séparés par des parois (parois de BLOCH).
Quand les directions de magnétisation des domaines contigus sont antiparallèles, on dit que la paroi est à 180° quand les directions sont perpendiculaires on dit que la paroi est à 90°.

Figure I.29 : Représentation schématique de la microstructure magnétique d’un cristal décomposé en domaines
Ce type de structure fréquemment observé correspond donc à un équilibre stable de la matière donc à un minimum énergétique.
L’arrangement en domaines magnétiques dicte le comportement magnétique macroscopique des matériaux ferromagnétiques. Ceci résulte de l’interaction et de la minimisation de plusieurs énergies : énergie d’échange, énergie d’anisotropie magnétocristalline, énergie magnétostatique, énergie magnéto-élastique, énergie des parois.
Application :
a) Capteur magnétostrictif :
Les matériaux ferromagnétiques exposent un effet magnétostrictif inverse qui se traduit par la modification de la susceptibilité magnétique en présence de contraintes mécaniques dans le matériau. C'est cet effet inverse que l'on va aussi exploiter dans les capteurs de déplacement.
Le transducteur magnétostrictif comporte un solénoïde à l'intérieur duquel se trouve placé un barreau en matériau ferromagnétique, le tout étant enfermé dans un cylindre assurant la fermeture du circuit magnétique. Une magnétisation statique du matériau est obtenue au moyen d'un aimant permanent solidaire du mouvement à enregistrer. L'électronique associée génère une impulsion qui va se déplacer dans le guide d'onde constitué par le barreau ferromagnétique et être perturbée par le champ induit par l'aimant qui se déplace. L'analyse de l'onde réfléchie en bout du barreau va permettre d'identifier la position de l'aimant.

Figure I.30 : Un capteur magnétostrictif
Les matériaux ferromagnétiques employés peuvent être le fer, le nickel, ou des alliages
aluminium-fer (alfenol) ou nickel-cobalt, bien que le matériau le plus couramment utilisé soit le Terfenol-D, du fait de ses bonnes performances magnétostrictives. Ce type de capteur permet des courses importantes (parfois jusqu'à 2 m) et supporte des pressions élevées. On l'emploie préférentiellement dans les vérins hydrauliques.
Les capteurs de position magnétostrictifs offrent tous les avantages des principes magnétostrictifs : mesures effectuées sans contact (aucun contact en effet entre le barreau ferromagnétique et l'aimant permanent), donc sans usure mécanique, reproductibilité maximum, durée d’utilisation maximum, mesure absolue.
b) Les actionneurs :
Un actionneur constitue le composant actif mécaniquement d'une chaîne d'asservissement d'une grandeur contrôlée par le déplacement d'une pièce. Les actionneurs à mouvement longitudinal ou transversal sont le plus souvent à base d'empilements piézoélectriques en PZT. Cependant, les actionneurs magnétostrictifs constitués à partir d'éléments en Terfenol-D présentent pour de basses tensions électriques, sans amplification hydraulique ou mécanique, des grands déplacements (20 à 550 μm) et des forces importantes
(500 à 10 000 N). Un actionneur magnétostrictif à mouvement longitudinal comporte un barreau de Terfenol-D, un enroulement de commande, parfois un aimant permanent polarisant et un ressort de précompression (> 5 MPa) de l'élément actif. Cette précompression est nécessaire pour que la magnétostriction soit forte et que le barreau reste en compression durant le fonctionnement. En effet, le Terfenol ne supporte que des contraintes maximales de tension 10 à 25 fois plus faibles que celles de compression. L'amplitude du mouvement généré par un tel actionneur dépend de l'intensité du champ magnétique appliqué, de la réaction de la charge et de la précompression. Par exemple, pour un actionneur de puissance comportant un cylindre de Terfenol-D de diamètre 20 mm et de longueur 500 mm le déplacement atteint au maximum 550 μm avec une charge de 2 kN pour un champ de 25,5 MPa, le déplacement est de 380 μm avec un champ de même intensité. Il est égal à 120 μm pour une force utile de 7 kN avec un champ et une précompression identiques aux valeurs précédentes. Cet actionneur est capable de générer une force utile dynamique de 9 kN environ à 400 Hz pour une fréquence d'un champ appliqué sinusoïdal égale à 200 Hz, la résistivité du Terfenol-D étant voisine de 60 μW.cm.
c) Émetteurs-récepteurs d’ondes élastiques :
Un résonateur magnétostrictif peut être utilisé comme transducteur émetteur ou récepteur d’ondes élastiques.
C’est dans le domaine des projecteurs ultrasonores basse fréquence (500 Hz par exemple) pour applications sous-marines que le Terfenol-D présente des avantages importants
par rapport aux céramiques piézoélectriques PZT [Pb (Zrx Ti1 – x) . La puissance crête ultrasonore que peut émettre un transducteur sans détérioration des performances est limitée par d'une part l'énergie volumique élastique de rupture ou de seuil de non-linéarité élastique du matériau, d'autre part l'énergie volumique magnétique maximale que supporte le matériau sans dépolarisation et non-linéarités magnétiques excessives. Cette puissance émise maximale par unité de volume du matériau actif est 10 fois plus élevée pour le Terfenol que pour les céramiques piézoélectriques PZT.